PlatformやSolution Frameworkに具備されている機能を活用し、様々な機器を非常に短期間でIoT化
プレスリリース
2024年4月10日米国PDI Technologies社とKii製品の再販契約を締結
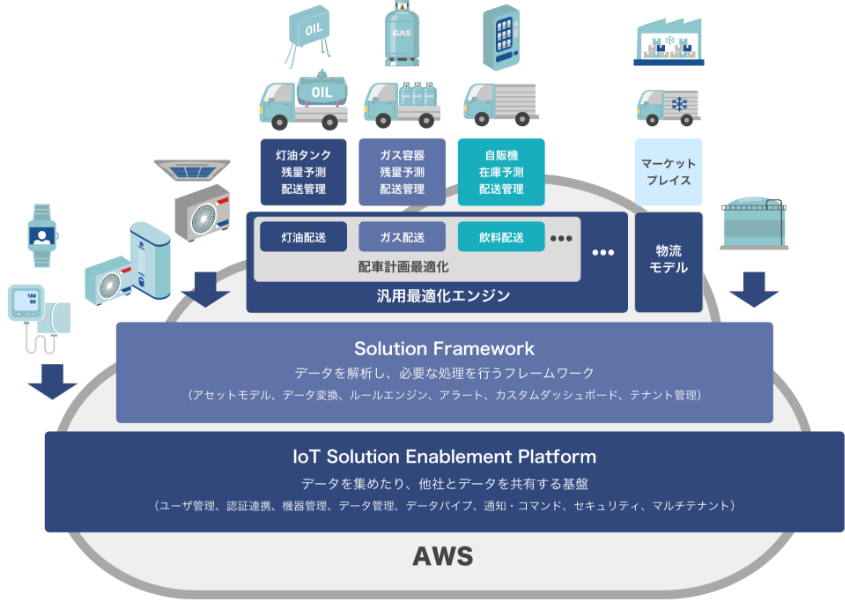
Kiiは、様々なIoTソリューションの基盤となれるIoTプラットフォームと、機器を監視したり制御するためのソリューションフレームワークを運用提供し、お客様のソリューション構築を支えています。そして、Kii自らもEnd-to-Endのソリューションを開発し、運用提供しています。
様々な機器のデータをクラウドで集約しクラウドから機器を制御、
データや分析結果のB2B展開を支援
Platform APIのうち、認証連携とデータパイプ以外のAPIに関する説明やサンプルコードはこちらのドキュメントを参照 *上記以外のPlatform APIとSolution Frameworkの詳細についてはリクエストベースで提供
機器をクラウドへ接続し、データの形式をクラウドに定義すれば、データの永続化と可視化が自動的に開始。データ分析によるアラート、SQLを書いて様々なグラフを備えたダッシュボードの生成なども簡単に実現
エンドユーザ向けアプリ用API、総合管理者機能、テナント管理者機能を提供
様々な形での3rd Partyとのデータ共有も支援
ヘルスケア機器、オフィス向けサービス、業務用機器や家庭用機器など、様々な分野でのIoT化、DX化の事例あり
Kii AI Engineを利用した配送業務高度化ソリューション
灯油配送高度化
各灯油タンクがあと何日灯油が保つかを予測し、給油の優先順位を決め、当日稼働できるタンクローリの台数に応じて、
最適な巡回経路と稼働時間を計算しながら各タンクローリへの灯油タンクの割り当てを行います。
Kiiはセンサを使わずに屋内暖房用の灯油タンクの残量を推定することに成功しています。
LPガス配送高度化
LPガスボンベの現状の残量予測を引き継ぎ、当社の配車最適化エンジンによるボンベ配送の効率化、
更にLPWA設置地点に対してはボンベの残日数予測を厳密化し、ボンベの交互交換から全量交換への転換を支援し、
更なる効率化を実現するとともに、配送担当者の負担や要件を軽減し、新規採用を容易化できる配送高度化を実現します
自動販売機飲料配送高度化
各自動販売機への各商品の充填本数を学習することにより、自動販売機内の在庫と売れ行きスピードを予測し、
自動販売機毎の補充優先度、当日の稼働配送車数、積載量等を加味し、最適な巡回経路と稼働時間を計算しながら、
各配送車への自動販売機の最適な割り当てと立ち寄り順を決定します。
配送担当者の稼働時間短縮、配送車の移動距離短縮、そして商品売切れ低減による売上増に貢献します。
タンク管理システム(米国)
米国の燃料販売・流通事業者向けのIoTソリューションを開発し、現地法人を通じて販売しています。
地上タンク遠隔管理では、液面センサーと専用アプリケーションを使用して燃料タンク内の残量を遠隔で管理し、給油作業を最適化します。
地下タンク遠隔管理では、専用コントローラに接続するアダプタを開発し、リークチェックや当局への報告を自動化しています。
詳細はこちら
Recruit
Kiiの社員のほとんどはエンジニアです。日本とスペインのエンジニアが一緒に開発をしています。エンジニアは5人程度のチームに別れて開発をしており、スクラム(Scrum of Scrum)を基本とした開発スタイルです。ツールには GitHub, CircleCIなどを使用し、AWS上でサービスを運用しています。 Kiiは海外にもチームがあるので、以前からリモートでも仕事ができる仕組みはありました。COVID-19以降は全員在宅作業に移行し、現時点(2024年4月)でもほとんど在宅で作業をする人が大部分です。日本国内では現時点ではほぼ全員が東京圏在住ですが、他地域在住の方からのご連絡もお待ちしています。

AIエンジニア
最適化エンジンの開発、チューニング、データ整備、アルゴリズムの設計
【必須スキル・経験】
Python 及び Javaの開発経験
データ解析の経験
日本語(ビジネスレベル)
英語(読解レベル)
【歓迎スキル・経験】
メタヒューリスティックシステムの開発経験
Github上でのコード公開
「データサイエンティスト」より「開発エンジニア」の志向が強い人を歓迎します
【勤務地】
在宅(日本全国どこでも)
devopsエンジニア
Kii Cloud バックエンドの開発、メンテナンス、オペレーション
【必須スキル・経験】
OS: RHEL/CentOS 6/7 の使用経験
RESTベースのシステム経験(ユーザとしての経験でも可)
日本語(ビジネスレベル)
英語(読解レベル)
【歓迎スキル・経験】
言語: Java, Python, Go, Javascript
AWS, Puppet, Ansible, Node.js 等に関連した業務経験
Devopsへの志向、システム運用業務経験
Github上でのコード公開
【勤務地】
在宅(日本全国どこでも)
about kii
Kiiは独自の製品戦略に基づき、エンジニア主体約40名の社員で、新規テクノロジー開発、基盤開発、フレームワーク開発、そしてソリューション開発に取り組んでいます。国内外の主要地域のクラウド上で24/365運用提供し、2007年11月の設立以来何千万台もの端末や機器が繋がり、数々のサービスを支えてきました。日米印のお客様やパートナーに恵まれ、日米の投資家から様々な支援をいただき、ユニークな立ち位置での事業展開を加速させています。
| 社名 | Kii株式会社 (Kii Corporation) |
|---|---|
| 本社 | 東京都港区赤坂2-5-7 |
| 経営陣 | 荒井 真成 代表取締役会長 共同創業者 鈴木 尚志 代表取締役社長 共同創業者 太田 将 取締役 CFO Skip Fleshman 社外取締役 Susan Choe 社外取締役 岡田 晃 監査役 Francisco Lozano VP Engineering |